Abstract

An increasing number of robots are made of soft materials. Because they are inherently safe to interact with, soft robots have been widely used in human-robot interactions. Moreover, due to their flexibility, they adapt to their environment, requiring less precision in certain tasks like grasp planning.
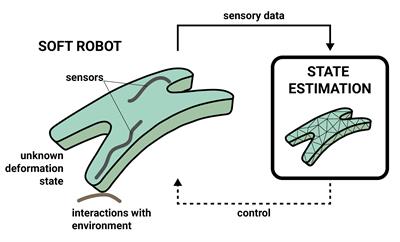
Nonetheless, soft robotic state estimation has its unique challenges. In general, soft robots are underactuated and have infinitely many degrees of freedom. They undergo large deformations and hence display a highly nonlinear hyperelastic behaviour. Furthermore, because many applications involve contact, we require state estimation algorithms to scale well and perform robustly in contact-rich interactions with humans or environments. To balance precision and timing requirements, novel proprioceptive sensing and Modeling are needed to estimate a soft robot’s state efficiently and effectively. Real-time state estimation also paves the way towards closed-loop control of soft robots.
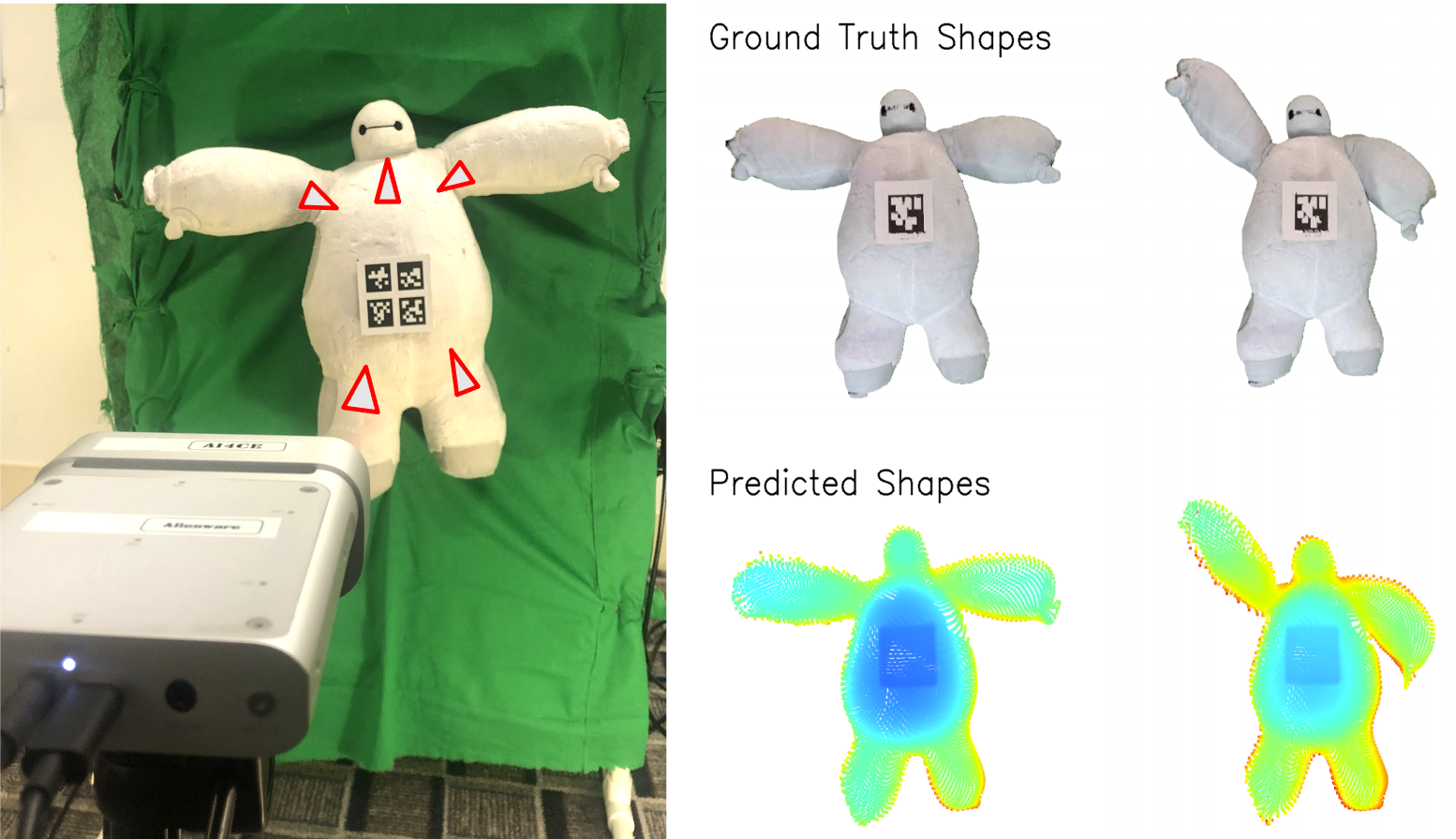
This workshop aims to exchange new knowledge, discover inspiring trends, and advance integrated software and hardware techniques for soft robot sensing and the estimation of their internal states, such as geometric shape and properties, strain- and stress-related quantities in quasi-static settings, and velocities and accelerations in dynamic settings. Our goal is to connect communities and stimulate collaborative research.